���]ϵ�y(t��ng)���d��� ����Windows10ϵ�y(t��ng)���d ����Windows7ϵ�y(t��ng)���d xpϵ�y(t��ng)���d ��X��˾W(w��ng)indows7 64λ�b�C(j��)�f�ܰ����d

���}��Ȧܛ�����}��Ȧ̓�M�C(j��)����ܛ���ṩ���d v1.6.0 ���°�

- ܛ����ͣ�����ܛ��
- ܛ���Z�ԣ����w����
- �ڙ�(qu��n)��ʽ�����M(f��i)ܛ��
- ���r(sh��)�g��2024-12-18
- ��x��(sh��)����
- ���]�Ǽ�(j��):
- �\(y��n)�Эh(hu��n)����WinXP,Win7,Win10,Win11
ܛ����B
�}��Ȧ̓�M�C(j��)������һ��I(y��)��3D�C(j��)�����ھ�����ܛ���������Ñ��ṩ��һ��(g��)���ھW(w��ng)�j(lu��)�ęC(j��)���˽����̈́�(chu��ng)���O(sh��)Ӌ(j��)ƽ�_(t��i)���Ñ��������@���p���O(sh��)Ӌ(j��)���N���S�΄�(w��)������߀�ܞ�̓�M�C(j��)�����O(sh��)Ӌ(j��)���N�О���\(y��n)��(d��ng)ģʽ���}��Ȧ���ÿ�ҕ���ĈD�ξ���ϵ�y(t��ng)��߀֧�ָ��N�Z�Եľ���ƽ�_(t��i)��ʹ�������dz����㺆�Σ��Ǵ�ҌW(xu��)��(x��)�˹����ܵĽ^��ܛ����
��ɫ����
���ھW(w��ng)�j(lu��)�đ�(y��ng)��ģʽ
��(chu��ng)���Ե�����˻��ھW(w��ng)�j(lu��)�đ�(y��ng)��ģʽ�����O�����˽⡢ʹ�ÙC(j��)���˼����ܿ��Ƽ��g(sh��)���T����
�������揊(qi��ng)��֧��
�������挦(du��)�C(j��)���˷������x�ش��Ԍ�(sh��)�F(xi��n)����ĬF(xi��n)��(sh��)�����\(y��n)��(d��ng)ģ�M���C(j��)�����(xi��ng)Ŀ�Ą�(chu��ng)���������W(xu��)��֪�R(sh��)�����������O������(qi��ng)��
�_�ŵ��(xi��ng)Ŀ�O(sh��)Ӌ(j��)����
ʹ��ƽ�_(t��i)�ṩ�ĸ��N�eľ�Y(ji��)��(g��u)����M���Ԙ�(g��u)����M��(chu��ng)��ęC(j��)����ģ�͡�
��(chu��ng)�µ��(q��)��(d��ng)�͂�������
��?y��n)��������������֧�֣�ƽ�_(t��i)�ṩ�˸��N��ͬ�������W(xu��)���Ե��(q��)��(d��ng)�C(j��)��(g��u)������ęC(j��)���ˑ�(y��ng)��(du��)���N��(f��)�s�������h(hu��n)�����΄�(w��)��
�ǻ۵Ŀ�ҕ������ϵ�y(t��ng)
��(bi��o)��(zh��n)��������ʽ��ģ�K���Ŀ�ҕ���D�ξ���ϵ�y(t��ng)�����Ի�������ƥ��ʽ(li��n)�빦�ܣ�����׃�ø����㣬�����ע�ڽ�Q���}�ķ�������������������չ�F(xi��n)��
�������T
�gӭʹ��“�}��Ȧ���S�C(j��)�����ھ�����ƽ�_(t��i)”(���º��Q“�}��Ȧ����”)�� ���ṩ��ȫ��ęC(j��)���˷����Q������
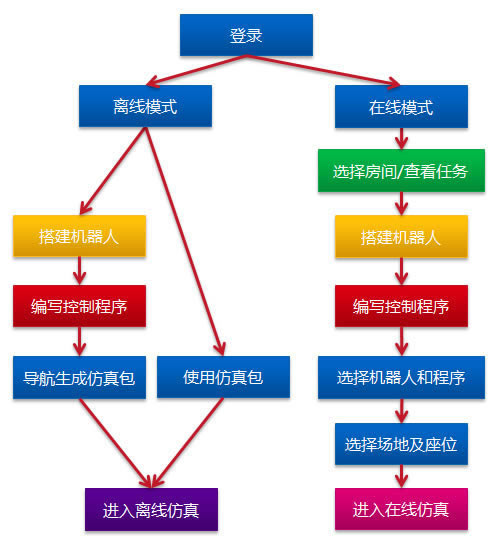
�˽̳̏����_ʼ���“Ӗ(x��n)��-܉�E”�΄�(w��)����ɴ��΄�(w��)��Ҫ�һ��܉�E�C(j��)���ˣ� ����֮�����D�λ����Ƴ���֮��ʹ�÷��挧(d��o)����(chu��ng)�������������w�(y��n)�ھ������^�̡�
�}��Ȧ�������x�����ھ��ɷNģʽ���x��ģʽ��Ҫ�M(j��n)�б��ؾ���(x��)ʹ�á� �ھ�ģʽ������ھ��΄�(w��)�������c�����Ñ��M(j��n)���ھ�PK�������зe���wϵ��
�D1���������̈D
ע��
���������p��“IRobotQ 3D”��ݷ�ʽ������(d��ng)“�}��Ȧ���S�C(j��)�����ھ�����ƽ�_(t��i)”�� �ڵ�䛴����ІΓ�“ע��”���ڞg�[�����@ʾע�ԾW(w��ng)퓣����������Ϣ���ע�ԡ�
���
����(d��ng)�ꮅ��䛴�����D 2��ʾ���ڵ�䛴�����ݔ���Ñ������ܴa���x�����(w��)���� �x����ģʽ���x��ģʽ���Γ�“Go!”�_ʼ��䛣�����ꮅ���M(j��n)���x��ģʽ�����ڡ�
�D2�����

�x��ģʽ
�x��ģʽ��������D��ʾ�����x��ģʽ�¿��M(j��n)�И�(g��u)����������(g��u)���C(j��)���ˡ����������_ʼ���桢�YԴ�������ГQ���ھ�ģʽ�ȡ�
�D3���x��������
�̳��΄�(w��)
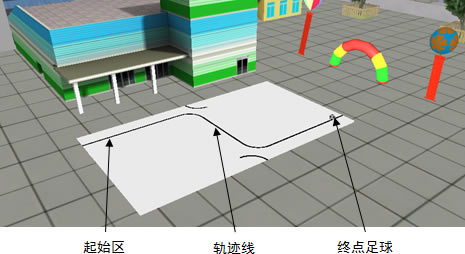
�˽̳����“Ӗ(x��n)��-܉�E”�΄�(w��)��Ҫ�ęC(j��)���˺Ϳ��Ƴ����΄�(w��)������D 4���΄�(w��)Ҫ�� �C(j��)���ˏ���ʼ�^(q��)���l(f��)����܉�E�����ߵ��K�c(di��n)���������ڽK�c(di��n)������r(sh��)����΄�(w��)�� �C(j��)�����������^����Ó�x܉�E��ҕ���΄�(w��)ʧ����
�D4��“Ӗ(x��n)��-܉�E”�΄�(w��)����
��ʾ��“Ӗ(x��n)��-܉�E”�΄�(w��)������“�ٷ��x��”�΄�(w��)�У����挧(d��o)���r(sh��)�����x��
������־
��������Ʒ���ք�(d��ng)ȫ����ͬ������
���YԴ�������棬���_/�����ļ�������M(j��n)���ք�(d��ng)��ͬ������
ͬ��Ҏ(gu��)�t�ǣ��������ĵ��ļ�(�Է���(w��)���r(sh��)�g���(zh��n))�ς����ƶ�(����У�@����(w��)��)�������؛]�е��ļ����ƶ�(����У�@����(w��)��)���d
��VPL���̕r(sh��)��ͬ�r(sh��)֧��c��python���a���A(y��)�[
��(y��u)���˱�ِ�r(sh��)�C(j��)����/�������ܣ��M���p�ٵ;W(w��ng)�ٵ�Ӱ�
1�M���ƽ̌W(xu��)ͨ2.0-�M���ƽ̌W(xu��)ͨ2.0���d v5......
2step7 microwin-���T��PLC S7......
3�ٶȾW(w��ng)�P��ˬ����������-�W(w��ng)�P����-�ٶȾW(w��ng)�P��ˬ��......
4360��ȫ�g�[��-�g�[��-360��ȫ�g�[�����d ......
5�ȸ�g�[�� XP��-�ȸ�g�[�� XP��-�ȸ�g�[......
6Kittenblock�ؑc�������ð�-�C(j��)���˾���......
7seo�������(����(j��)���) -SEO��會�(y��u)������......
8Notepad3-ӛ�±�ܛ��-Notepad3��......
9С���\(y��n)��(d��ng)ˢ����(sh��)����-С���\(y��n)��(d��ng)ˢ����(sh��)�������d v2......
1����\(y��n)��GHOST���bϵ�y(t��ng),��������\(y��n)���R���b�C(j��)
2Ů����ɶ���^��ã��m��Ů���\(y��n)�õ����^��_��
3���Ľ�����ΰ��bghostxpϵ�y(t��ng)
4�o�����(bi��o)�p�ĵĎNԭ�� �Լ�̎������
5Windows��������(j��)Win10ʧ����ʾ0x80...
6����(j��)Windows10 1607�汾�ľ��w�O(sh��)�÷�...
7win10��X�桶ֲ����(zh��n)��ʬ���W�˵�̎���k��
82018������^����ɶ��2018���Ů��...